PLC控制纠偏控制器是工业控制中常用的一种方法,它能够有效地提高系统的稳定性和安全性。本文介绍了PLC控制纠偏控制器的方法与策略,包括控制器的设计、实现和测试等方面。根据系统的需求,确定控制器的输入和输出信号,以及控制器的控制算法。通过编程实现控制算法,并将控制器集成到系统中。对控制器进行测试和验证,确保其正确性和可靠性。在实际应用中,还需要根据系统的实际情况进行调整和优化,以提高系统的效率和稳定性。
在现代化工业生产线中,纠偏控制器扮演着至关重要的角色,用于确保产品路径的精确性和生产的稳定性,PLC(可编程逻辑控制器)作为现代工业自动化的核心设备,如何有效地控制纠偏控制器,提升生产效率和产品质量,成为当前工业领域关注的热点,本文将从理论和实践两个层面,探讨PLC如何控制纠偏控制器的方法和策略。
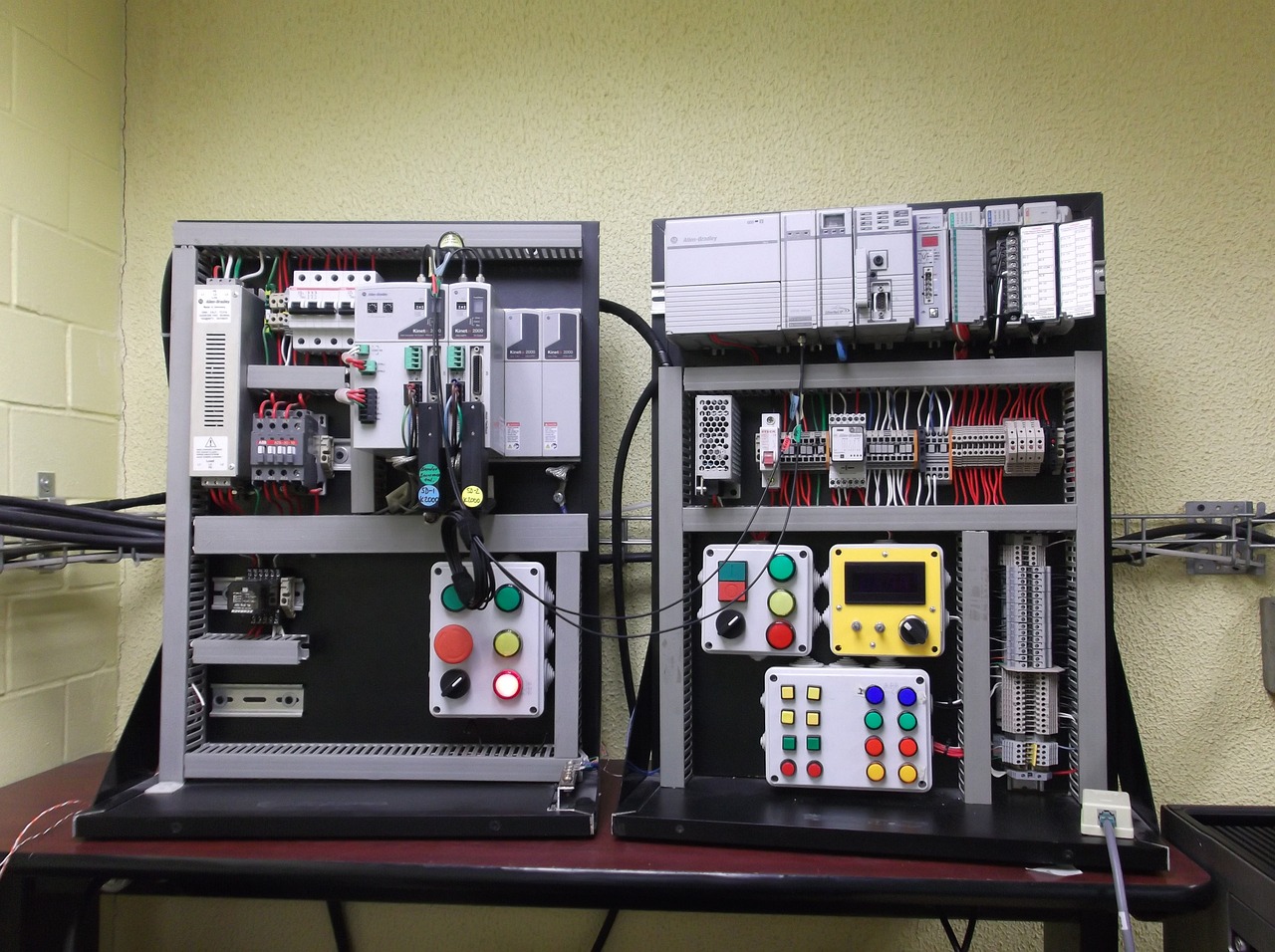
纠偏控制器的工作原理与需求
纠偏控制器,顾名思义,用于纠正生产线上的偏差,它通过检测产品路径的偏移量,经过内部算法处理后,输出控制信号,驱动执行机构进行纠偏动作,在实际应用中,纠偏控制器需要满足以下几点需求:
1、精确性:纠偏控制器需要精确检测偏差,并确保纠偏动作的准确性。
2、稳定性:纠偏控制器需要稳定运行,避免因自身故障或干扰导致生产异常。

3、响应速度:纠偏控制器需要快速响应偏差变化,减少生产过程中的等待时间。
PLC控制纠偏控制器的方法
针对纠偏控制器的需求,PLC可以通过以下几种方法进行控制:
1、数字控制:PLC可以通过内置的数学模型,对纠偏控制器进行精确的数字控制,通过设定目标路径和偏差阈值,PLC可以实时调整控制参数,优化纠偏效果。

2、模拟控制:除了数字控制外,PLC还可以实现模拟控制,通过采集纠偏控制器的模拟信号,PLC可以对其进行连续的控制和调整,这种控制方法适用于需要精确控制且偏差变化较小的场景。
3、控制算法优化:为了提高纠偏控制器的性能,PLC可以集成先进的控制算法,如PID(比例-积分-微分)控制、模糊控制等,这些算法可以根据偏差变化自动调整控制参数,实现更高效的纠偏控制。
PLC控制纠偏控制器的策略
在控制纠偏控制器时,PLC需要遵循一定的策略以确保控制效果的最优化:

1、偏差检测与调整:PLC需要实时检测纠偏控制器的偏差变化,并根据设定的阈值进行及时调整,当偏差超过设定阈值时,PLC应立即启动纠偏动作,确保产品路径的精确性。
2、优先级划分:在实际应用中,可能存在多个纠偏控制器同时工作的情况,PLC需要合理划分优先级,确保对关键路径的精确控制,优先级划分可以根据偏差大小、产品种类、生产速度等因素进行设定。
3、故障检测与处理:为了确保纠偏控制器的稳定运行,PLC需要实现故障检测与处理功能,通过检测执行机构的工作状态、采集传感器信号等方式,PLC可以及时发现并解决潜在问题,避免生产异常的发生。

本文详细探讨了PLC如何有效控制和策略性管理纠偏控制器的方法和策略,通过数字控制和模拟控制两种方式的应用,以及控制算法的优化和故障检测处理机制的建立,PLC能够精确控制纠偏控制器的工作状态,提升生产效率和产品质量,未来随着工业技术的不断进步和智能化技术的应用,PLC在纠偏控制器控制方面的能力将得到进一步提升和完善。
与本文内容相关的文章: