PLC控制伺服控制器的方法主要包括以下几个方面:需要确定控制需求,例如需要控制伺服电机的速度、位置等参数。根据控制需求选择合适的PLC控制器,需要考虑控制精度、响应速度等因素。需要配置PLC控制器的相关参数,例如设定控制模式、调整PID参数等,以确保控制效果。还需要编写控制程序,以实现对伺服电机的精确控制。控制程序可以包括初始化、数据处理、控制算法等部分。需要进行测试和优化,以确保控制效果符合实际需求。,,通过以上步骤,PLC控制器可以实现对伺服电机的精确控制,提高系统的稳定性和效率。还可以根据实际需求进行灵活调整和优化,以满足不同场景下的控制需求。
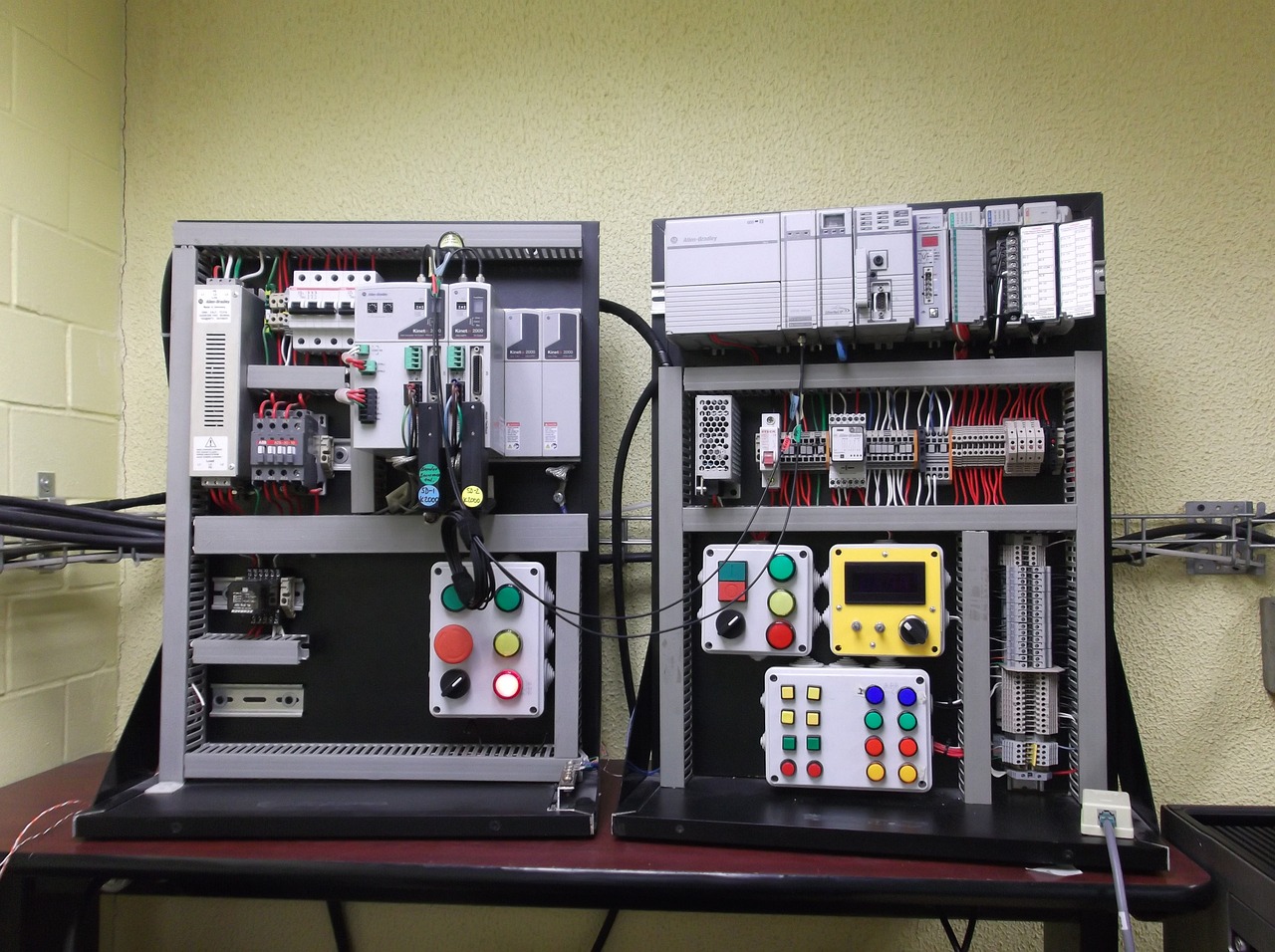
在现代工业控制系统中,PLC(可编程逻辑控制器)和伺服控制器是不可或缺的关键组件,PLC用于处理逻辑和控制任务,而伺服控制器则负责驱动和执行精确的运动控制,本文详细介绍了PLC如何控制伺服控制器,包括通信协议、控制方法、以及优化策略等方面。
PLC与伺服控制器的通信协议
1、通信协议概述:
PLC与伺服控制器之间的通信协议是确保两者能够顺畅、准确通信的关键,常见的通信协议包括Modbus、Profinet、EtherNet/IP等,这些协议在数据传输、错误检测、控制指令等方面进行了详细定义,从而保证了系统的稳定性和可靠性。
2、通信协议配置:

在PLC与伺服控制器进行通信之前,需要对通信协议进行配置,这包括选择正确的通信协议、设置通信参数(如波特率、数据位、停止位等)、以及配置通信地址等,确保这些配置的正确性对于系统的正常运行至关重要。
PLC控制伺服控制器的方法
1、控制方法概述:
PLC控制伺服控制器的方法通常包括位置控制、速度控制、加速度控制等,这些方法可以通过PLC内部的控制算法或者外部的控制指令来实现,位置控制是最基本的控制方式,用于精确控制伺服电机的位置;速度控制则用于控制伺服电机的速度;加速度控制则用于控制伺服电机的加速度。
2、控制方法实现:
在实现PLC控制伺服控制器时,需要编写相应的控制程序,这个程序需要根据系统的实际需求来确定控制算法和控制参数,还需要考虑系统的安全性、稳定性、效率等方面的问题,通过不断的调试和优化,可以得到一个满足系统需求、性能良好的控制程序。

优化策略及建议
1、优化策略概述:
为了进一步提高PLC控制伺服控制系统的性能和稳定性,可以采取一些优化策略,这些策略包括优化控制算法、改进通信协议、增加系统容错能力等方面,通过实施这些优化策略,可以使得系统更加精确、高效、可靠地运行。
2、具体优化建议:
(1)优化控制算法:可以采用更先进的控制算法来提高系统的响应速度和稳定性,可以采用模糊控制、神经网络控制等智能控制算法来替代传统的PID控制算法。
(2)改进通信协议:可以采用一些更加高效、可靠的通信协议来提高系统的数据传输效率和错误检测能力,可以采用Modbus TCP/IP协议来替代传统的Modbus串口通信协议。

(3)增加系统容错能力:可以通过设置合理的系统参数和采用一些容错技术来提高系统的容错能力,可以设置过大的位置偏差阈值来避免系统因微小位置偏差而频繁触发错误处理机制。
本文详细介绍了PLC控制伺服控制器的方法,包括通信协议、控制方法、以及优化策略等方面,通过合理的配置和优化的控制策略,可以使得PLC与伺服控制器之间的通信更加顺畅、准确,从而提高整个工业控制系统的性能和稳定性。
与本文内容相关的文章: