PLC(可编程逻辑控制器)和运动控制器是自动化控制系统中常见的两种设备,它们之间的主要区别如下:,,1. 功能不同:PLC主要用于控制逻辑运算、数据处理、定时、计数等功能,而运动控制器则主要用于控制物体的运动,如速度、方向、加速度等。,2. 精度不同:运动控制器通常具有更高的控制精度,可以实现更精确的控制和更高的定位精度,而PLC的控制精度相对较低。,3. 适用性不同:PLC适用于控制各种逻辑和顺序控制,而运动控制器则更适用于控制物体的运动。,4. 连接方式不同:PLC通过总线或以太网等连接方式,可以实现远程控制和监控,而运动控制器则通常通过专业的接口连接,如RS232、RS485等。,,PLC和运动控制器各有其特点,适用于不同的控制系统和场景。在实际应用中,需要根据具体的需求和场景选择合适的设备。
随着工业自动化的不断发展,PLC(可编程逻辑控制器)和运动控制器作为重要的自动化设备,在工业生产中发挥着越来越重要的作用,尽管PLC和运动控制器在功能上有许多相似之处,但它们在应用、设计和实现等方面却存在明显的差异,本文将从多个方面探讨PLC与运动控制器的区别,帮助读者更好地了解这两种设备的特点和差异。
功能定位不同
PLC,即可编程逻辑控制器,是一种用于控制和管理工业过程的设备,它通常用于实现各种逻辑控制、数据处理和通信等功能,通过编程,PLC可以实现复杂的控制逻辑,从而实现精确的控制和高效的自动化生产。
运动控制器则是一种用于控制机械运动轨迹的设备,它通常用于实现机械运动的控制、监测和调节等功能,运动控制器具有高精度、高稳定性、高可靠性等特点,可以实现精确的控制和高效的自动化生产。

应用场景不同
PLC和运动控制器在应用场景上也存在明显的差异,PLC通常应用于各种工业领域,如制造业、电力、水利等,用于实现各种自动化控制和管理功能,而运动控制器则主要应用于机械、电子、航空等需要精确控制机械运动的领域。
设计和实现方式不同
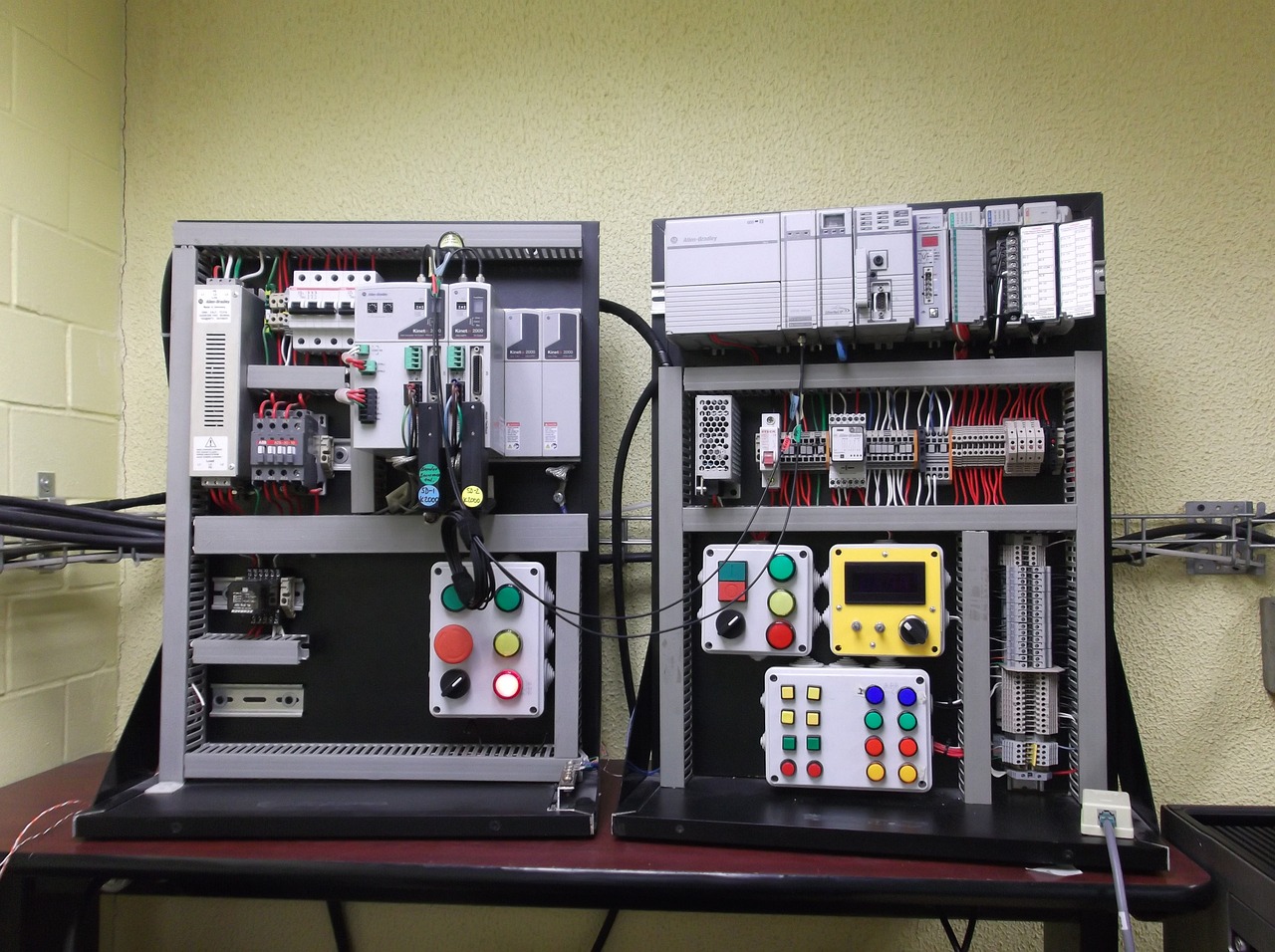
PLC和运动控制器在设计和实现方式上也有所不同,PLC通常是由硬件和软件组成的系统,其中硬件部分包括处理器、输入/输出模块、通信模块等,软件部分则包括操作系统、编程语言等,通过编程,可以实现各种控制逻辑和功能。
而运动控制器则更注重硬件部分的设计和实现,运动控制器通常具有专门的硬件电路和算法,用于实现精确的控制和高效的自动化生产,运动控制器还支持多种传感器、执行器等设备的连接和控制,可以实现更加复杂的控制逻辑和功能。
性能指标不同
PLC和运动控制器在性能指标上也存在明显的差异,PLC主要关注系统的稳定性、可靠性和易用性等方面,而运动控制器则更注重系统的精度、速度、稳定性等方面,运动控制器通常具有更高的性能指标,可以满足更加精确的控制需求。

PLC和运动控制器在数据处理能力、通信能力等方面也存在一定的差异,PLC通常具有强大的数据处理能力和丰富的通信接口,可以实现复杂的数据处理和高效的通信功能,而运动控制器则更注重实时数据处理和精确的控制算法的实现。
PLC与运动控制器在功能定位、应用场景、设计和实现方式以及性能指标等方面存在明显的差异,读者可以根据具体的应用场景和需求,选择合适的设备来实现所需的自动化控制和管理功能。
与本文内容相关的文章: